
Robots
Designed, manufactured, built, and programmed over the last 7 years
CHESS ROBOT | Personal
[Project Overview] My roommate Matthew and I have been developing a 3D-printed chess robot. ㅤㅤㅤㅤ
[My Role and Contributions] I’ve handled all the designing, 3D printing, and assembly. We initially used standard servos but switched to Dynamixel servos for smoother control at slow speeds. ㅤㅤㅤㅤ
[Design Features] The redesigned arm features hidden servos and cables, a hawk-inspired gripper (grabs by default, only needs power to open), joints supported on both sides and a design that eliminates all backlash except for the servos themselves.

CIVIL ENGINEERING AUTOMATION | Research
[Description & Goals] Automate soil and concrete testing with a Kinova Gen3 robot arm by developing a universal vision and machine learning software package. ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤ
[My Role and Solutions] Programming the robot arm using ROS2, implementing vision for sample and obstacle detection, developing a machine learning algorithm, and collaborating with Ahmed on the software package. ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤ
[Outcomes and Lessons Learned] While the project is ongoing, I have hard-coded arm movements, and am learning ROS2 and MoveIt for better control and simulations as well as working to use the cameras to create point clouds to detect samples and avoid obstacles.

SKORPIO | Charged Up
[Project Overview] Skorpio was designed to pick up and place inflatable cubes and traffic cones.ㅤㅤ
[Challenges Faced] To tackle the challenge of picking up traffic cones from any orientation, I spent weeks prototyping a system to reorient the cones for quick intaking. ㅤ[Integration Efforts] I tirelessly integrated this system, along with the rest of the robot’s design and electronics.

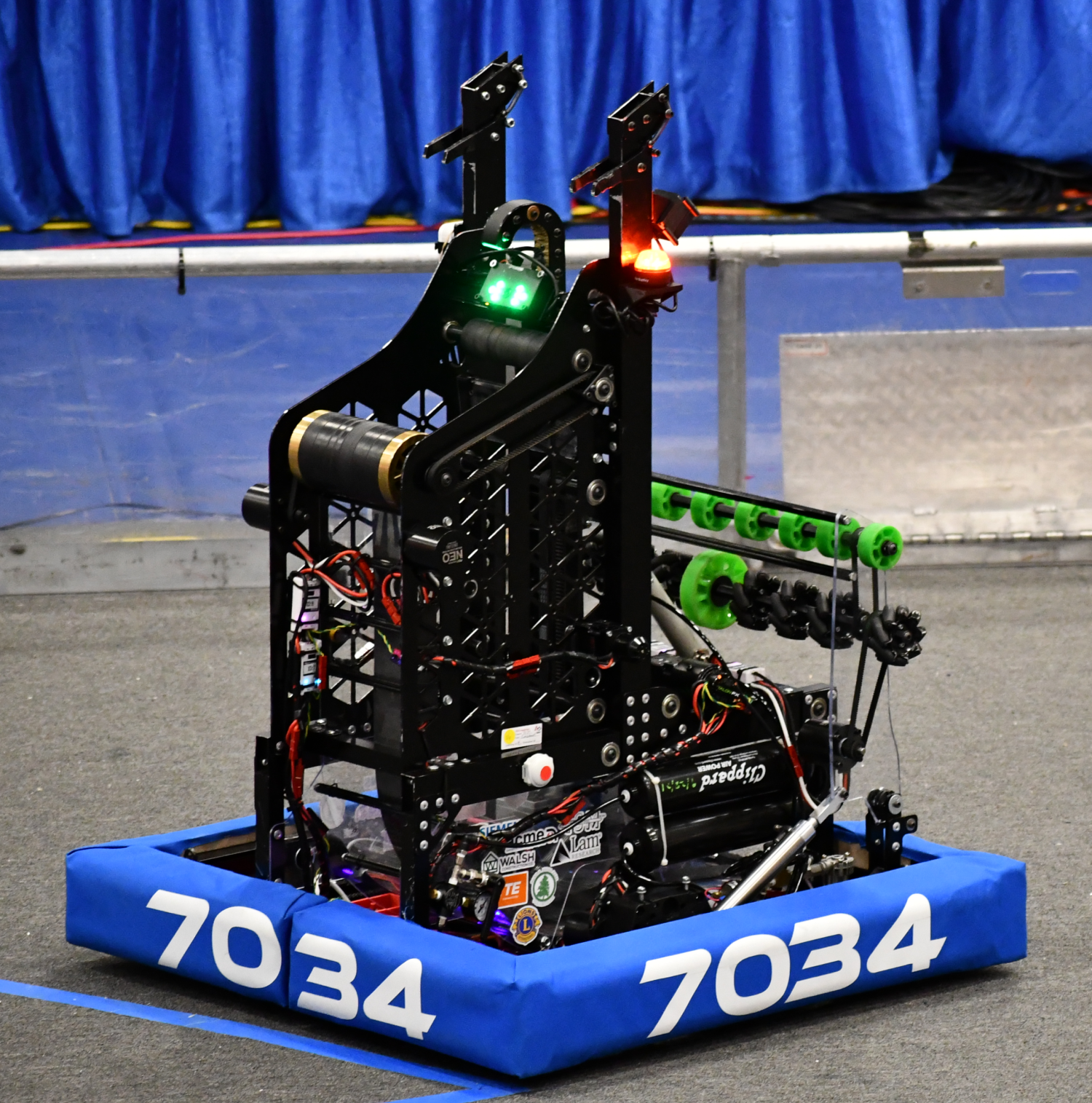
BLACK BOT | Rapid React
[Project Overview] Named “Black Bot,” in spirit of our team’s indecision this robot reached the finals at the FIRST World Championship as the alliance captain, making it the most accomplished in our team’s history. ㅤㅤㅤㅤ
[My Role and Achievements] I led the design and integration of all subsystems, including developing a basketball-like shooter. After 7 prototypes and over 300 trials, I refined the design, achieving over 95% accuracy—one of the most precise in the world. ㅤㅤ
[Technical Contributions] I also conducted kinematic analysis to ensure the robot’s complex monkeybar climbing motion worked flawlessly the first time.
SUPERNOVA | Infinite Recharge
[Project Overview] Supernova was the first competition FRC robot I ever worked on. I was in charge of the intake design and gained a ton of experience that has been instrumental in robot design since. ㅤㅤㅤㅤ
[Key Learnings] I discovered that you should never rely on gravity for speed or reliability, how incredibly hard it is to drill through string steel, how to use pneumatics, and that string is not the way to deploy an intake and since have used more complex linkages. ㅤㅤ

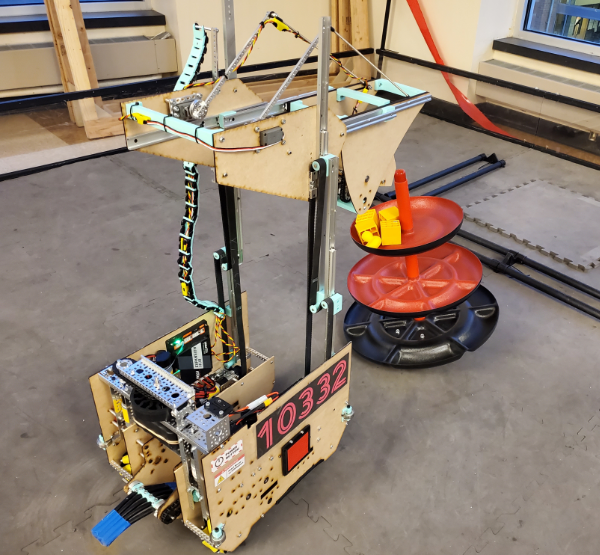
SPARKY | Ultimate Goal
[Project Overview] The season my team built Sparky almost didn’t exist due to COVID-19. School was going online which meant robotics wasn’t going to happen. ㅤㅤㅤㅤ
[My Role and Efforts] I recruited a team and hosted them at my house working in the cold with masks. While we were limited in our resources and manufacturing, the added flexibility enabled our most successful FTC season ever resulting in a very competitive bot and season. ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤ
[Achievements] We received the Innovate Award, finished 2nd place in the Inspire Award, and 3rd place in points overall in our league. ㅤㅤ
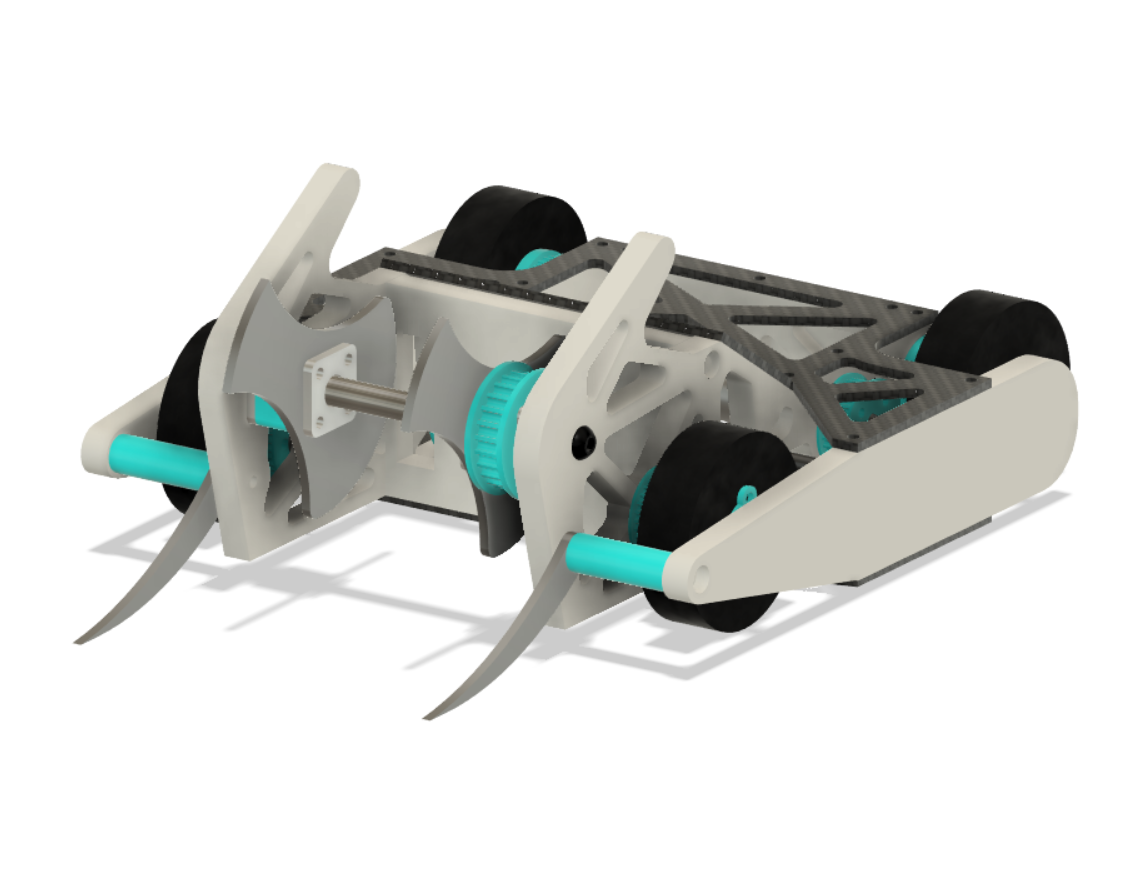
RYNO | Drum Spinner
[Project Overview] I designed a 3lb beetle-weight combat robot using titanium for the weapon shaft, carbon fiber for strong, lightweight plates, and HDPE for a lightweight, impact-resistant structure. ㅤㅤ[Challenges Faced] Unfortunately, I couldn’t manufacture the robot due to machining limitations at OSU and the design being overweight.
ㅤㅤ[Future Plans] In the future, I plan to redesign it to be lighter and easier to machine or outsource some of the machining. ㅤ
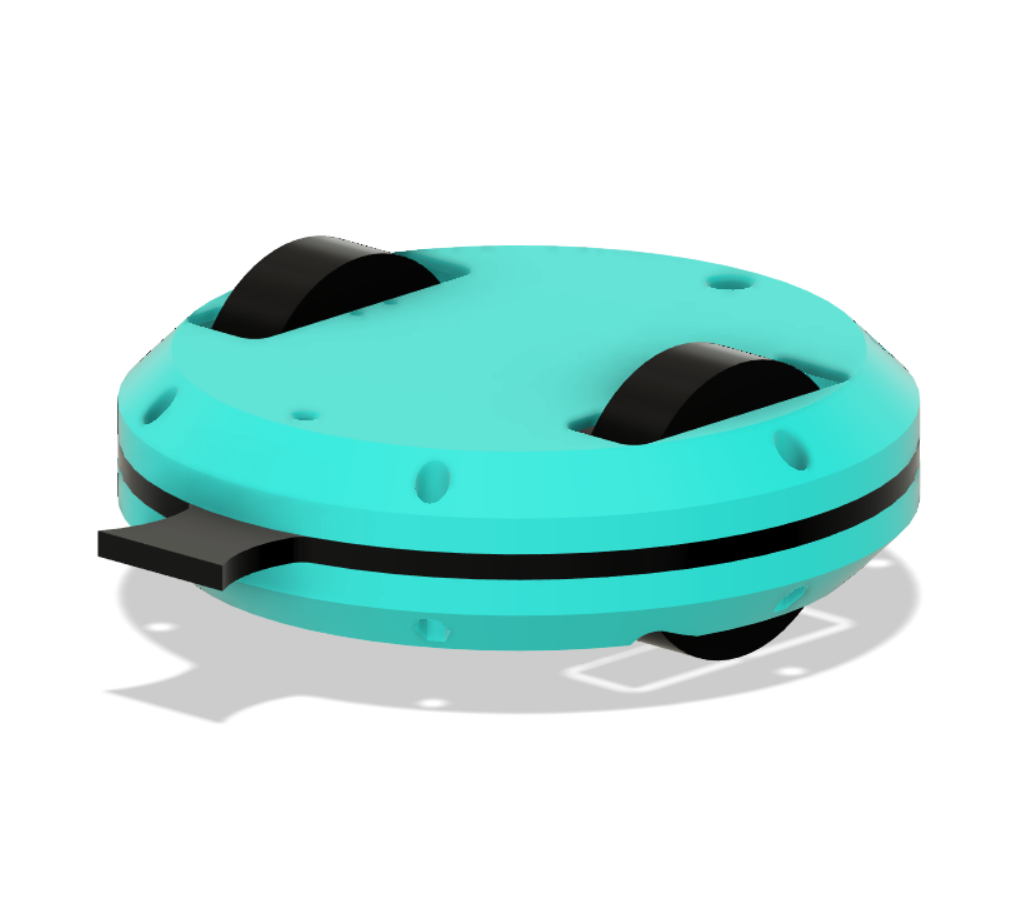
TRYCLONE | Melty Brain
[Project Overview] I’m currently designing a combat robot inspired by my friend Camdyn’s 2-wheeled melty brain robot. Instead of 2 wheels, my design features 3 for improved stability and traction, and because it’s a novel approach that could yield interesting results. ㅤㅤㅤㅤ
[Design Concept] In a melty brain robot, the entire robot spins at high speed, and by pulsing the motors, it can move in any direction. Control is achieved by flashing a light at a consistent point in the rotation, marking the front of the robot. By adjusting the heading, the robot can be directed to move forward in any desired direction.
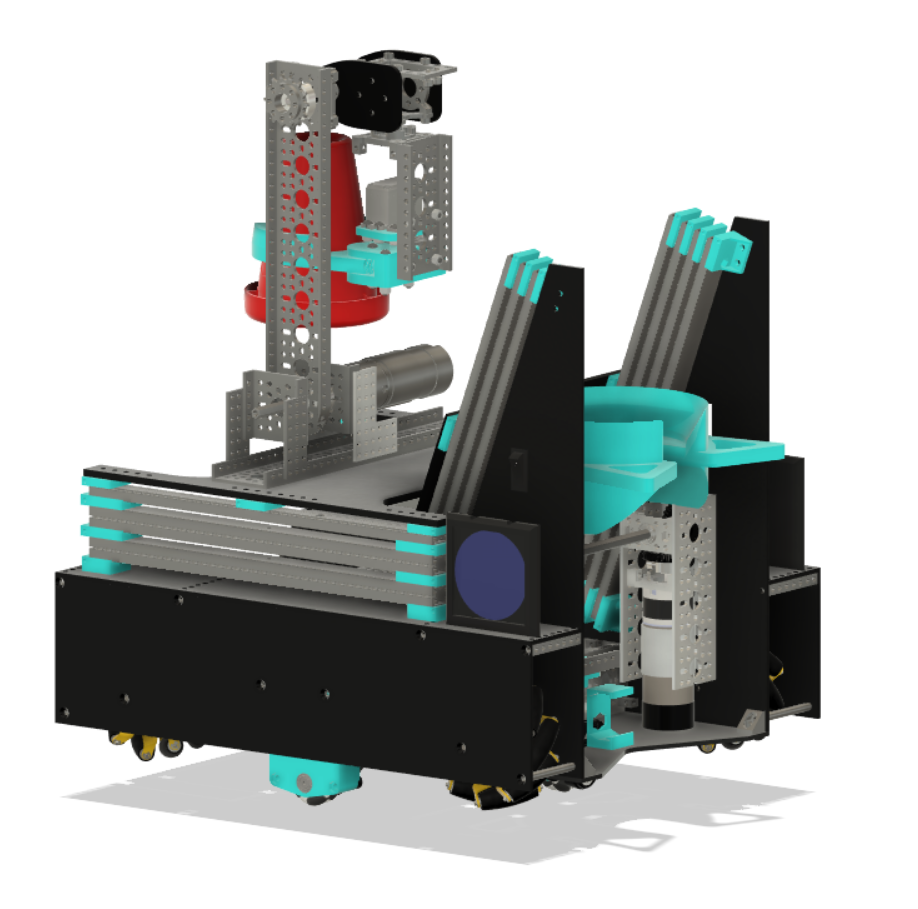
SLIDIE | Powerplay
[Project Overview] This robot named after its 14 drawer slides could extend about 5 feet horizontally and vertically, taking advantage of a loophole in the game. ㅤㅤㅤㅤ
[Functionality] While only able to control one cone at a time, this robot was able to place a cone on a pole while extending out to grab another cone immediately after, resulting in rapid cycles. ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤ
[My Role and Efforts] I did all the design of this robot and delegated building, programming, and prototyping to the rest of my team.
WOOD·E | Freight Frenzy
[Project Overview] This robot was impressively dense for only being made out of wood. I designed everything tightly in the sides. While it made for a narrow design, it led to lots of difficulty in assembly. ㅤㅤㅤㅤ
[Material Choice] Wood-e wasn’t originally planned to be made of wood but due to time, novelty, and decent enough rigidity of the wood, we kept it which ended up being more of a benefit than a drawback. ㅤㅤ
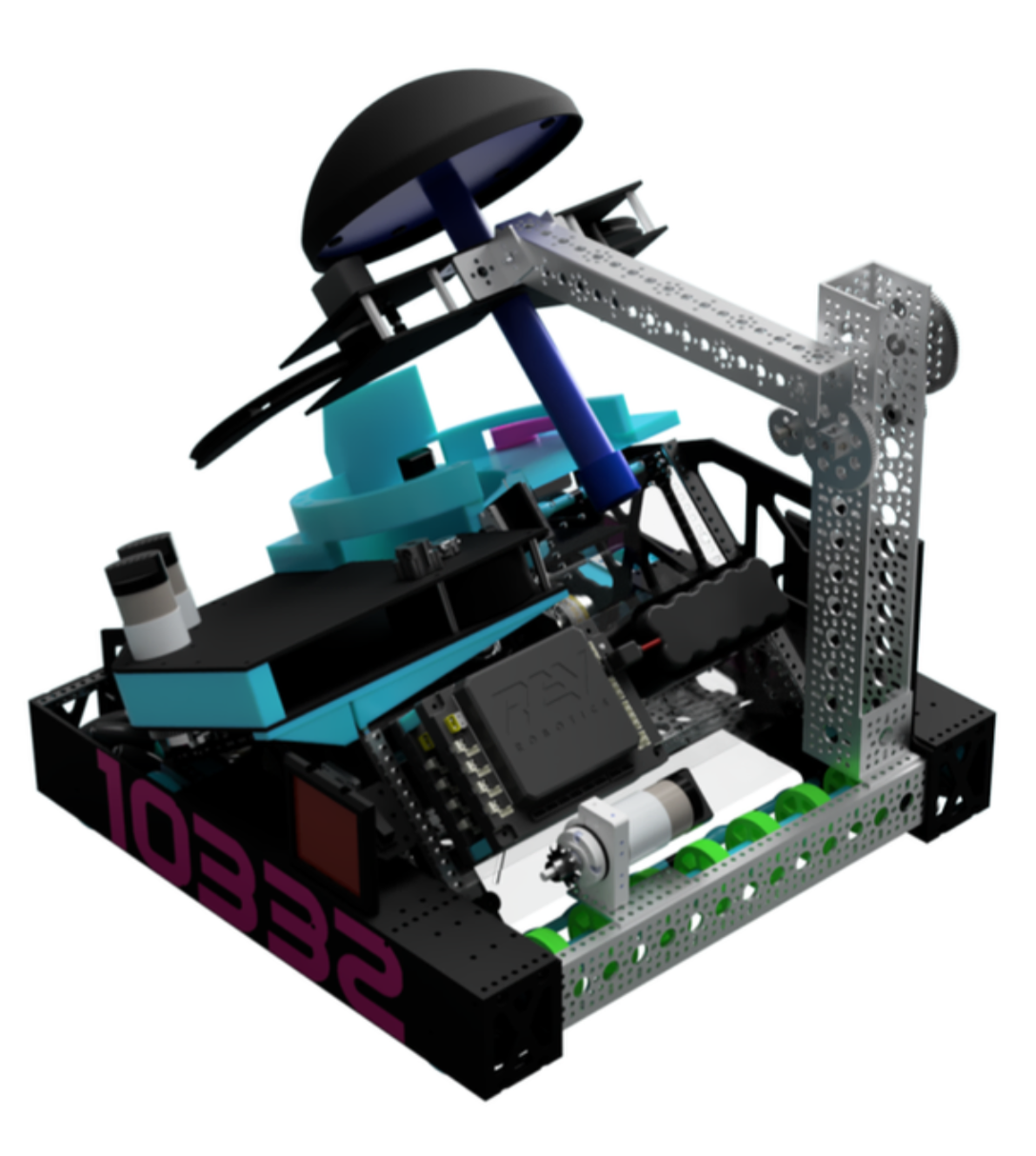
GOLDEN RATIO | Torchlight CAD Competition
[Project Overview] This robot was made in a week during a CAD competition. ㅤㅤㅤㅤ
[My Role and Efforts] I led a team of a handful of people through game analysis, brainstorming, and design of this robot. ㅤㅤㅤ
[Design Features] Golden Ratio features a custom swerve drive, shoots ping pong balls, and can also climb supersized stairs by lifting itself up into the air and driving on tiny wheels. ㅤㅤ

TURRET DRIVEBASE | Changing the System Camp
[Project Overview] I developed this relatively simple robot design using the goBILDA kit of parts for use in our FTC team’s 3 different camp serieses. ㅤㅤㅤㅤ
[My Role and Efforts] Along with the design, I created a 30-page LEGO-style instruction manual on how to assemble and wire it. Without any electrical experience, I taught myself how to solder and create an electronics box that connects the battery, a receiver, motor controllers, and a switch together for a simple-to-use all-in-one electronics box that could be used for a plethora of robots and camps. ㅤ
